基于智能软材料的软体机器人具有和传统电机驱动的机器人类似的感知外界刺激,产生相应的驱动行为的能力,同时具有和生命体更加匹配的力学性能,更友好的人机交互界面,预期能更好地模拟自然界的各自生物运动模式,近年来受到了广泛的关注。随着其深入发展,人们提出了越来越高的期望,比如能够实现软体机器人驱动行为的按需重构是一个重要的发展方向。从材料角度,具有异质结构的驱动器是实现驱动的关键,异质结构往往通过化学交联的方式来固定,一旦形成,很难改变,这导致软体驱动器的驱动行为较为单一,且难以根据实际需求进行重新编辑。近年来,科研人员们利用一定刺激下的可逆反应初步实现了驱动器的异质结构的重构,使同一软体机器人能够展现多模式驱动行为。但目前报道的重构过程通常需要高温加工、图案化光场、化学处理、精密设备等复杂操作,实际应用受到了限制。如何在温和条件下实现软体驱动器和机器人的便捷重构仍是一项挑战。针对这一问题,澳门新甫京娱乐娱城平台游正伟教授团队采用模块化的思想提出了宏观任意愈合组装 (Macroscopically discretionary healing-assembly)策略,利用材料自愈合性,实现了软体驱动器和机器人的便捷高效重构。相关成果以“A New Strategy of Discretionarily Reconfigurable Actuators Based on Self-Healing Elastomers for Diverse Soft Robots”为题,发表于材料学领域国际著名学术期刊《先进功能材料》(Advanced Functional Materials)。澳门新甫京娱乐娱城平台澳门新甫京娱乐娱城平台硕士生楼佳铭是论文的第一作者,博士生刘增贺是论文的共同第一作者,游正伟教授是该论文的通讯作者。
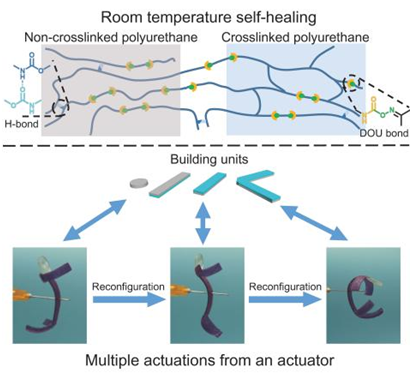
图1. 基于自愈合聚肟氨酯材料的宏观任意愈合组装的可重构软体机器人的总体设计
游正伟教授团队长期从事弹性体研究,近年来在自愈合弹性体领域取得系列进展(Nat. Commun. 2021, DOI: 10.1038/s41467-021-24680-x; Natl. Sci. Rev.2021, 8: nwaa154; Adv. Mater. 2019, 31: 1901402; Adv. Funct. Mater. 2019, 29: 1901058; Sci. China Mater.2021, 64: 1791; Mater. Chem. Front. 2019, 3: 1833),特别是在动态聚肟氨酯弹性体方向开展了较为系统的研究 (邀请综述:Chinese J. Polym. Sci. 2021, DOI: 10.1007/s10118-021-2625-9),本工作以此为基础设计构建软体机器人。通过控制交联度便捷制备了对溶剂具有不同的溶胀度的聚肟氨酯模块,模块之间由于其自愈合性,可以组装结合为异质复合结构,通过不同模块简单自由的组合,可以灵活构建在溶剂刺激下驱动行为各异的软体机器人;这些组装的机器人能够被任意裁剪成简单模块,再重新愈合组装,构筑具有新的驱动行为的软体机器人(图1)。
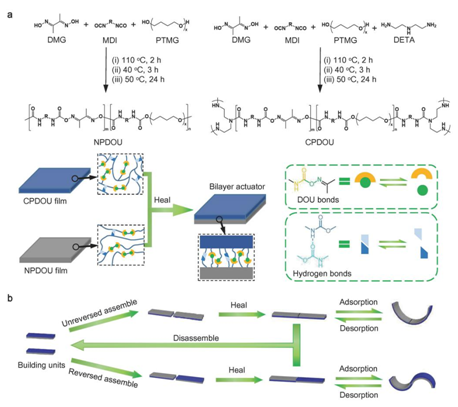
图2. 自愈合聚肟氨酯材料设计及宏观任意愈合组装策略展示
图2以双层驱动器为例,阐述了自愈合软体驱动器的构建和重构过程。交联的聚肟氨酯(CPDOU)和线性的聚肟氨酯(NPDOU)无缝愈合为一个异质结构。动态肟氨酯键在异质结构界面处重组,赋予了驱动器良好的界面结合强度。不同交联度的聚肟氨酯在溶剂中的溶胀速率和溶胀度不同,从而双层结构的驱动器能在溶剂刺激下发生可逆的变形(图3),并在循环驱动中展现了出色的稳定性。通过调整两层的几何参数可以有效调控驱动器在溶剂刺激下的变形程度。
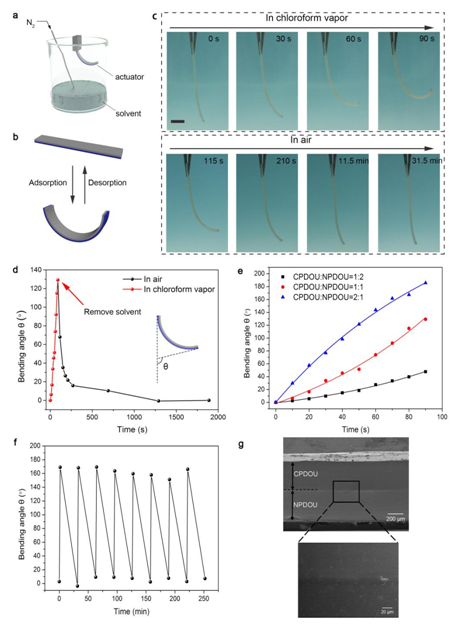
图3. 双层驱动器的驱动性能及良好界面结合。
驱动器的自愈合性是实现宏观任意愈合组装策略的关键。作者考察了上述双层驱动器在切断后原位愈合和翻转后再对接愈合两种组装模式对驱动器的愈合性能的影响(图4)。由于断裂面之间的动态肟氨酯键和氢键的作用,驱动器在两种愈合模式下均展现出快速的愈合。在室温愈合15 min后,在两种模式下愈合样条均展现出了良好的力学性能的恢复,可以被拉伸到至少200%而不发生断裂。
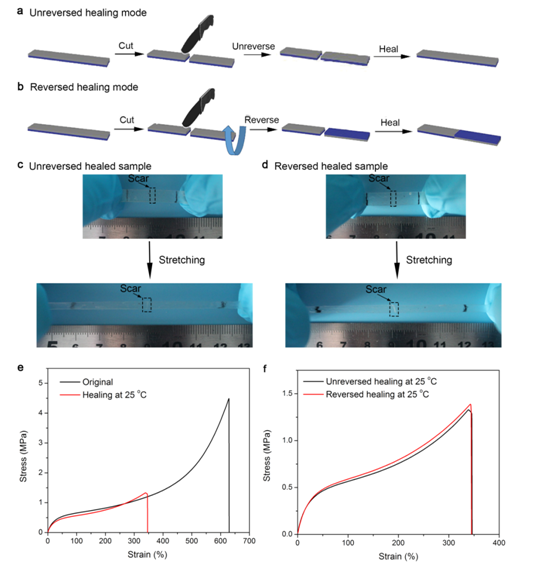
图4. 双层驱动器的室温愈合性
以上述的异质双层驱动器和原有同质聚肟氨酯为模块,通过对模块的数量、形状和排列的简单组合,作者构建了一系列传统的制造方法难以制备的具有不同3D驱动行为的软体机器人(图5)。
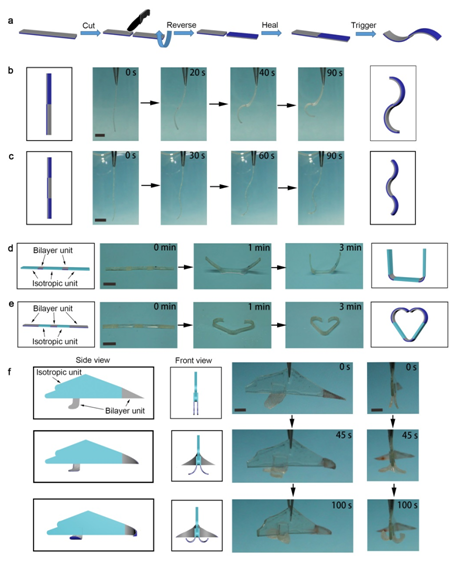
图5. 模块化愈合组装策略构建驱动行为各异的软体机器人
接着作者展现了使用宏观任意裁剪愈合组装策略来实现软体机器人的重构(图6)。首先从一个长条状的驱动器出发,调整模块的组合方式,使该驱动器能够展现C形、S形、波浪形三种不同的驱动模式。然后以人形软体机器人为例,通过改变“手臂”、“身体”和“腿”模块的排列,其在同一溶剂刺激下的驱动变形能够在跪姿、拥抱和瑜伽坐角式三种姿势中相互切换。除了改变驱动行为,该策略还能够赋予驱动器一些特定功能,比如作者将仅发生简单弯曲变形的长条状驱动器重构成一个四臂式机器人,在溶剂刺激下该机器人能够举起自重1.5倍的铝板。该策略中对驱动器的拆解及模块的再组装过程简便灵活,从理论上讲,可以实现无限重构,通过合理的设计,有望构建出多模式、多功能的软体机器人。
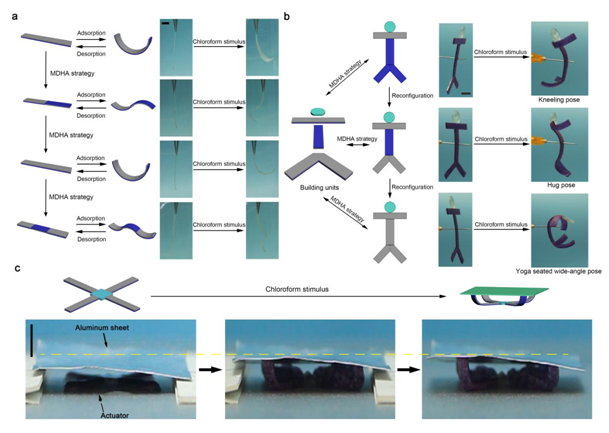
图6. 软体驱动器和机器人的室温便捷灵活重构
该工作基于材料自愈合性,提出了一种宏观任意愈合组装策略,通过简单模块的拆解组装愈合在室温下实现软体机器人的灵活的构筑和重构,整个过程无需其他刺激和特别设备,室温下可反复多次进行,展现了前所未有的便捷性。基于材料的本征自愈合性实现软体机器人重构的思路,此前未见报道,该策略可以拓展到磅礴兴起的其它自愈合材料,为新一代软体机器人的设计和制造提供新的思路,同时也扩宽了自愈合材料的应用范围。
该工作获得了国家自然科学基金、上海市自然科学基金、澳门新甫京娱乐娱城平台励志计划等项目资助。
原文链接:https://doi.org/10.1002/adfm.202008328
团队主页:http://pilab.dhu.edu.cn/zyou/main.psp




 澳门新甫京娱乐娱城平台
澳门新甫京娱乐娱城平台